因?yàn)閷I(yè)
所以領(lǐng)先
![[LOGO]](/template/default/image/logob.png)
![[LOGO]](/template/default/image/logoll.png)
因?yàn)閷I(yè)
所以領(lǐng)先
![[→]](/template/default/picture/zixuniconim1.svg) 立即咨詢
立即咨詢
![[x]](/template/default/picture/closeicon1.png)
![[→]](/template/default/image/zixuniconim1.png) 立即咨詢
立即咨詢
![[x]](/template/default/image/closeicon1.png)

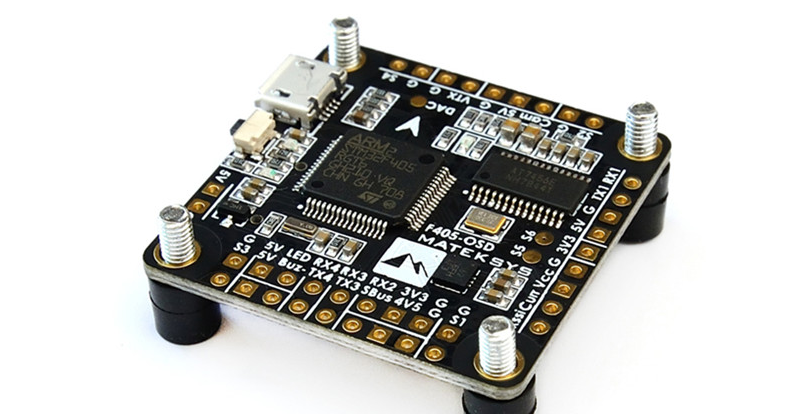
無(wú)人機(jī)飛行控制器是無(wú)人機(jī)的核心部分,如同人的大腦一樣,對(duì)無(wú)人機(jī)的飛行起著至關(guān)重要的作用。其關(guān)鍵技術(shù)涵蓋多個(gè)方面:

1. 傳感器的運(yùn)用
陀螺儀和加速度計(jì)是姿態(tài)控制中常用的傳感器。陀螺儀用于測(cè)量無(wú)人機(jī)的角速度,能精確感知無(wú)人機(jī)在俯仰、橫滾和偏航方向上的旋轉(zhuǎn)速度。例如在四軸無(wú)人機(jī)中,當(dāng)無(wú)人機(jī)發(fā)生傾斜時(shí),陀螺儀能快速檢測(cè)到傾斜的角速度。加速度計(jì)則測(cè)量無(wú)人機(jī)的加速度,可通過(guò)加速度值計(jì)算出無(wú)人機(jī)的傾斜角度等姿態(tài)信息。兩者結(jié)合,為飛行控制器提供了無(wú)人機(jī)實(shí)時(shí)的姿態(tài)數(shù)據(jù)。
磁力計(jì)(電子羅盤(pán))也是重要的傳感器,它可以確定無(wú)人機(jī)的航向,即確定無(wú)人機(jī)相對(duì)于地磁北極的方向,這對(duì)于保持無(wú)人機(jī)的穩(wěn)定飛行方向非常關(guān)鍵。 2. 姿態(tài)解算算法
姿態(tài)解算就是利用傳感器采集的數(shù)據(jù)計(jì)算出無(wú)人機(jī)的當(dāng)前姿態(tài),如俯仰角、橫滾角和航向角等。常用的姿態(tài)解算算法有互補(bǔ)濾波算法和卡爾曼濾波算法等。互補(bǔ)濾波算法簡(jiǎn)單有效,它可以將陀螺儀和加速度計(jì)的數(shù)據(jù)進(jìn)行融合。例如,陀螺儀數(shù)據(jù)在短期內(nèi)較為準(zhǔn)確,可用于提供高頻的姿態(tài)變化信息;而加速度計(jì)數(shù)據(jù)在長(zhǎng)期較為穩(wěn)定,可用于校正陀螺儀的漂移。卡爾曼濾波算法則更加復(fù)雜和精確,它通過(guò)建立狀態(tài)方程和觀測(cè)方程,對(duì)無(wú)人機(jī)的姿態(tài)進(jìn)行最優(yōu)估計(jì),能夠在存在噪聲和不確定性的情況下,更準(zhǔn)確地計(jì)算出無(wú)人機(jī)的姿態(tài)信息。 3. 姿態(tài)控制算法
PID(比例 - 積分 - 微分)控制算法是姿態(tài)控制中常用的算法之一。在姿態(tài)控制中,比例項(xiàng)(P)根據(jù)當(dāng)前姿態(tài)與目標(biāo)姿態(tài)的偏差大小,按比例地輸出控制信號(hào),偏差越大,輸出信號(hào)越強(qiáng),從而快速調(diào)整無(wú)人機(jī)的姿態(tài)。積分項(xiàng)(I)主要用于消除穩(wěn)態(tài)誤差,例如當(dāng)無(wú)人機(jī)存在小的姿態(tài)偏差且長(zhǎng)時(shí)間未得到糾正時(shí),積分項(xiàng)會(huì)逐漸積累,產(chǎn)生一個(gè)糾正偏差的控制信號(hào)。微分項(xiàng)(D)則根據(jù)姿態(tài)偏差的變化率來(lái)調(diào)整控制信號(hào),能夠?qū)ψ藨B(tài)的快速變化進(jìn)行抑制,防止無(wú)人機(jī)姿態(tài)出現(xiàn)超調(diào)現(xiàn)象。例如在四軸無(wú)人機(jī)飛行過(guò)程中,當(dāng)受到外界干擾導(dǎo)致姿態(tài)發(fā)生變化時(shí),PID控制器根據(jù)姿態(tài)解算得到的偏差,調(diào)整四個(gè)電機(jī)的轉(zhuǎn)速,從而糾正無(wú)人機(jī)的姿態(tài),使其恢復(fù)到穩(wěn)定狀態(tài)。
1. GPS技術(shù)
GPS(全球定位系統(tǒng))是無(wú)人機(jī)導(dǎo)航與定位中廣泛應(yīng)用的技術(shù)。GPS系統(tǒng)由24顆衛(wèi)星組成,衛(wèi)星不斷向地面發(fā)送信號(hào)。無(wú)人機(jī)上的GPS接收器接收這些信號(hào),通過(guò)計(jì)算信號(hào)的時(shí)延,可以得到無(wú)人機(jī)到衛(wèi)星的距離。利用至少三顆衛(wèi)星的信號(hào),就可以解算出無(wú)人機(jī)的位置(經(jīng)度、緯度和高度)信息。GPS技術(shù)能夠?yàn)闊o(wú)人機(jī)提供較為精確的絕對(duì)位置信息,精度可以達(dá)到數(shù)米甚至更高,這對(duì)于無(wú)人機(jī)的自主導(dǎo)航,如按照預(yù)設(shè)航線飛行、返航等操作至關(guān)重要。例如,在農(nóng)業(yè)無(wú)人機(jī)進(jìn)行農(nóng)田噴灑作業(yè)時(shí),GPS可以引導(dǎo)無(wú)人機(jī)按照預(yù)先規(guī)劃的航線準(zhǔn)確飛行,確保整個(gè)農(nóng)田區(qū)域都能被均勻噴灑。 2. 慣性導(dǎo)航系統(tǒng)(INS)
慣性導(dǎo)航系統(tǒng)主要基于加速度計(jì)和陀螺儀等慣性傳感器。加速度計(jì)測(cè)量無(wú)人機(jī)的加速度,通過(guò)對(duì)加速度進(jìn)行積分可以得到速度信息,再對(duì)速度進(jìn)行積分就可以得到位置信息。陀螺儀測(cè)量無(wú)人機(jī)的角速度,用于確定無(wú)人機(jī)的姿態(tài)方向。慣性導(dǎo)航系統(tǒng)的優(yōu)點(diǎn)是不依賴外部信號(hào)源,具有自主性,能夠在GPS信號(hào)受到遮擋或干擾時(shí),繼續(xù)為無(wú)人機(jī)提供導(dǎo)航信息。但是,由于慣性傳感器存在誤差,如加速度計(jì)的測(cè)量誤差和陀螺儀的漂移,隨著時(shí)間的推移,慣性導(dǎo)航系統(tǒng)的定位誤差會(huì)逐漸累積。因此,通常將慣性導(dǎo)航系統(tǒng)與GPS等其他導(dǎo)航技術(shù)結(jié)合使用,以提高導(dǎo)航定位的精度和可靠性。 3. 組合導(dǎo)航技術(shù)
為了克服單一導(dǎo)航技術(shù)的局限性,組合導(dǎo)航技術(shù)應(yīng)運(yùn)而生。例如,將GPS和慣性導(dǎo)航系統(tǒng)組合使用。在這種組合導(dǎo)航系統(tǒng)中,GPS提供高精度的位置和速度信息,用于校正慣性導(dǎo)航系統(tǒng)的累積誤差;慣性導(dǎo)航系統(tǒng)則在GPS信號(hào)丟失或受到干擾時(shí),提供短期的、相對(duì)準(zhǔn)確的導(dǎo)航信息。此外,還可以結(jié)合其他導(dǎo)航技術(shù),如地磁導(dǎo)航、視覺(jué)導(dǎo)航等。地磁導(dǎo)航利用地球磁場(chǎng)信息為無(wú)人機(jī)導(dǎo)航,視覺(jué)導(dǎo)航則通過(guò)無(wú)人機(jī)上的攝像頭獲取周圍環(huán)境的圖像信息,進(jìn)行圖像分析和處理,從而確定無(wú)人機(jī)的位置和姿態(tài)。通過(guò)多種導(dǎo)航技術(shù)的組合,可以提高無(wú)人機(jī)導(dǎo)航與定位的精度、可靠性和適應(yīng)性。
1. 電機(jī)控制
對(duì)于多旋翼無(wú)人機(jī)(如四軸、六軸無(wú)人機(jī)等),電機(jī)的控制是動(dòng)力系統(tǒng)控制的關(guān)鍵。飛行控制器根據(jù)姿態(tài)控制算法和導(dǎo)航指令,調(diào)整各個(gè)電機(jī)的轉(zhuǎn)速。例如在四軸無(wú)人機(jī)中,四個(gè)電機(jī)的轉(zhuǎn)速差異會(huì)改變無(wú)人機(jī)的姿態(tài)和推力。當(dāng)需要無(wú)人機(jī)上升時(shí),飛行控制器會(huì)同時(shí)增加四個(gè)電機(jī)的轉(zhuǎn)速;當(dāng)需要無(wú)人機(jī)向左傾斜飛行時(shí),飛行控制器會(huì)降低左側(cè)電機(jī)的轉(zhuǎn)速,同時(shí)增加右側(cè)電機(jī)的轉(zhuǎn)速,從而產(chǎn)生向左的傾斜力矩和推力分量,使無(wú)人機(jī)向左飛行。電機(jī)的控制需要精確的信號(hào)輸出,通常通過(guò)電調(diào)(電子調(diào)速器)來(lái)實(shí)現(xiàn)。電調(diào)根據(jù)飛行控制器發(fā)送的控制信號(hào),調(diào)節(jié)電機(jī)的輸入電壓或電流,從而改變電機(jī)的轉(zhuǎn)速。 2. 電池管理
電池是無(wú)人機(jī)的動(dòng)力來(lái)源,電池管理技術(shù)對(duì)于無(wú)人機(jī)的飛行性能和安全性至關(guān)重要。電池管理系統(tǒng)需要實(shí)時(shí)監(jiān)測(cè)電池的電量、電壓、電流和溫度等參數(shù)。例如,通過(guò)監(jiān)測(cè)電池電壓可以防止電池過(guò)放電,避免電池?fù)p壞。當(dāng)電池電量較低時(shí),飛行控制器可以根據(jù)電池管理系統(tǒng)提供的信息,發(fā)出返航指令或者降低飛行速度等操作,以確保無(wú)人機(jī)能夠安全返回。同時(shí),電池管理系統(tǒng)還可以對(duì)電池進(jìn)行均衡充電,防止電池單體之間出現(xiàn)過(guò)充或過(guò)放的情況,延長(zhǎng)電池的使用壽命。 3. 動(dòng)力分配與優(yōu)化
在無(wú)人機(jī)飛行過(guò)程中,飛行控制器需要根據(jù)不同的飛行狀態(tài)(如懸停、加速、轉(zhuǎn)彎等)合理分配動(dòng)力。在懸停狀態(tài)下,動(dòng)力系統(tǒng)需要提供足夠的升力來(lái)平衡無(wú)人機(jī)的重力,并且各個(gè)方向的推力要保持平衡。在加速飛行時(shí),需要根據(jù)加速度的要求,合理增加電機(jī)的轉(zhuǎn)速,調(diào)整動(dòng)力分配。此外,還可以通過(guò)動(dòng)力優(yōu)化算法,提高動(dòng)力系統(tǒng)的效率。例如,根據(jù)無(wú)人機(jī)的負(fù)載、飛行環(huán)境(如風(fēng)速、氣溫等)等因素,優(yōu)化電機(jī)的轉(zhuǎn)速控制策略,降低能量消耗,延長(zhǎng)無(wú)人機(jī)的飛行時(shí)間。
1. 姿態(tài)感知基礎(chǔ)
姿態(tài)穩(wěn)定控制是無(wú)人機(jī)飛行控制的基礎(chǔ)核心技術(shù)。如前所述,它依賴于多種傳感器來(lái)感知無(wú)人機(jī)的姿態(tài)。除了陀螺儀、加速度計(jì)和磁力計(jì)等常見(jiàn)傳感器外,還有一些高精度的慣性測(cè)量單元(IMU)。IMU是一種集成了多個(gè)加速度計(jì)和陀螺儀的裝置,能夠更加精確地測(cè)量無(wú)人機(jī)的三軸姿態(tài)角(俯仰角、橫滾角和航向角)以及加速度信息。這些傳感器的數(shù)據(jù)采集頻率很高,例如一些高端的IMU可以達(dá)到數(shù)千赫茲的采集頻率,能夠?qū)崟r(shí)捕捉無(wú)人機(jī)姿態(tài)的微小變化。 2. 姿態(tài)穩(wěn)定算法的多樣性
除了傳統(tǒng)的PID控制算法外,還有一些先進(jìn)的姿態(tài)穩(wěn)定算法。例如模糊PID控制算法,它結(jié)合了模糊邏輯和PID控制的優(yōu)點(diǎn)。模糊邏輯可以根據(jù)專家經(jīng)驗(yàn)和實(shí)際飛行情況,將姿態(tài)偏差和偏差變化率等輸入量進(jìn)行模糊化處理,然后通過(guò)模糊規(guī)則表確定PID控制器的比例、積分和微分系數(shù)。這種算法在面對(duì)復(fù)雜的飛行環(huán)境和不確定性因素時(shí),具有更好的適應(yīng)性和魯棒性。另外,基于模型預(yù)測(cè)控制(MPC)的姿態(tài)穩(wěn)定算法也逐漸應(yīng)用于無(wú)人機(jī)飛行控制。MPC算法通過(guò)建立無(wú)人機(jī)的動(dòng)態(tài)模型,預(yù)測(cè)未來(lái)一段時(shí)間內(nèi)無(wú)人機(jī)的姿態(tài)變化,然后根據(jù)預(yù)測(cè)結(jié)果優(yōu)化控制策略,能夠有效地處理多變量、非線性的姿態(tài)控制問(wèn)題。
1. 位置控制原理
位置控制對(duì)于無(wú)人機(jī)完成各種任務(wù)(如航拍中的定點(diǎn)拍攝、物流配送中的目標(biāo)投遞等)至關(guān)重要。飛行控制器根據(jù)預(yù)設(shè)的目標(biāo)位置(可以是經(jīng)緯度坐標(biāo)或者相對(duì)于某個(gè)參考點(diǎn)的坐標(biāo)),通過(guò)導(dǎo)航系統(tǒng)獲取無(wú)人機(jī)當(dāng)前的位置信息,計(jì)算出位置偏差。然后利用位置控制算法,調(diào)整無(wú)人機(jī)的飛行姿態(tài)和推力,使無(wú)人機(jī)向目標(biāo)位置飛行。在這個(gè)過(guò)程中,需要考慮無(wú)人機(jī)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)特性。例如,對(duì)于多旋翼無(wú)人機(jī),其位置控制與姿態(tài)控制是相互關(guān)聯(lián)的,通過(guò)調(diào)整姿態(tài)來(lái)改變無(wú)人機(jī)的飛行方向,進(jìn)而實(shí)現(xiàn)位置的改變。 2. 速度控制的實(shí)現(xiàn)
速度控制與位置控制密切相關(guān)。飛行控制器根據(jù)目標(biāo)速度(包括水平速度和垂直速度),結(jié)合當(dāng)前的速度測(cè)量值(可以通過(guò)GPS、慣性導(dǎo)航系統(tǒng)等獲取),計(jì)算出速度偏差。然后通過(guò)調(diào)整電機(jī)的轉(zhuǎn)速或者舵面的角度(對(duì)于固定翼無(wú)人機(jī))來(lái)改變無(wú)人機(jī)的推力或阻力,從而實(shí)現(xiàn)速度的控制。例如,當(dāng)無(wú)人機(jī)需要加速飛行時(shí),飛行控制器增加電機(jī)的轉(zhuǎn)速,提高推力,使無(wú)人機(jī)加速;當(dāng)需要減速時(shí),則降低電機(jī)轉(zhuǎn)速或調(diào)整舵面增加阻力。同時(shí),速度控制也需要考慮無(wú)人機(jī)的空氣動(dòng)力學(xué)特性,如在不同的飛行高度和風(fēng)速條件下,無(wú)人機(jī)的空氣阻力會(huì)發(fā)生變化,這就需要對(duì)速度控制算法進(jìn)行相應(yīng)的調(diào)整。
1. 不同飛行模式的特點(diǎn)
無(wú)人機(jī)具有多種飛行模式,如手動(dòng)飛行模式、自動(dòng)飛行模式和半自主飛行模式等。手動(dòng)飛行模式下,操作員通過(guò)遙控器直接控制無(wú)人機(jī)的飛行姿態(tài)、速度和位置等參數(shù)。這種模式需要操作員具備較高的飛行技能和經(jīng)驗(yàn),但在一些特殊情況下(如無(wú)人機(jī)出現(xiàn)故障需要緊急處理)非常有用。自動(dòng)飛行模式下,無(wú)人機(jī)根據(jù)預(yù)設(shè)的任務(wù)航線、飛行高度、速度等參數(shù)自主飛行,不需要操作員實(shí)時(shí)干預(yù)。例如在農(nóng)業(yè)無(wú)人機(jī)進(jìn)行大面積農(nóng)田巡查時(shí),可以按照預(yù)先設(shè)定的航線自動(dòng)飛行。半自主飛行模式則介于兩者之間,操作員可以在飛行過(guò)程中對(duì)某些關(guān)鍵參數(shù)進(jìn)行調(diào)整,同時(shí)無(wú)人機(jī)也可以根據(jù)自身的傳感器信息進(jìn)行一些自主決策,如避障操作等。 2. 飛行模式切換的邏輯與安全保障
飛行模式的切換需要遵循一定的邏輯和安全機(jī)制。當(dāng)從手動(dòng)飛行模式切換到自動(dòng)飛行模式時(shí),飛行控制器需要確保當(dāng)前的飛行狀態(tài)滿足自動(dòng)飛行的條件,如姿態(tài)穩(wěn)定、位置準(zhǔn)確等。同時(shí),在切換過(guò)程中,要保證控制信號(hào)的平穩(wěn)過(guò)渡,避免無(wú)人機(jī)出現(xiàn)突然的姿態(tài)變化或失控現(xiàn)象。為了確保飛行安全,飛行控制器在切換飛行模式時(shí),會(huì)進(jìn)行一系列的檢查和確認(rèn)操作。例如,在從自動(dòng)飛行模式切換到手動(dòng)飛行模式時(shí),會(huì)提示操作員進(jìn)行身份驗(yàn)證或者操作權(quán)限確認(rèn),防止誤操作導(dǎo)致飛行事故。
1. 陀螺儀原理
陀螺儀基于角動(dòng)量守恒原理工作。簡(jiǎn)單來(lái)說(shuō),它是一個(gè)高速旋轉(zhuǎn)的剛體,當(dāng)無(wú)人機(jī)發(fā)生角運(yùn)動(dòng)時(shí),由于角動(dòng)量守恒,陀螺儀的旋轉(zhuǎn)軸會(huì)相對(duì)慣性空間保持不變,從而可以測(cè)量出無(wú)人機(jī)相對(duì)于慣性空間的角速度。例如,在機(jī)械陀螺儀中,一個(gè)高速旋轉(zhuǎn)的轉(zhuǎn)子被安裝在一個(gè)框架內(nèi),當(dāng)無(wú)人機(jī)繞某個(gè)軸旋轉(zhuǎn)時(shí),框架會(huì)相對(duì)轉(zhuǎn)子發(fā)生轉(zhuǎn)動(dòng),通過(guò)檢測(cè)框架的轉(zhuǎn)動(dòng)角度或角速度,就可以得到無(wú)人機(jī)的角速度信息。而現(xiàn)代的微機(jī)電系統(tǒng)(MEMS)陀螺儀則是利用微加工技術(shù)制造的小型化陀螺儀,其工作原理基于科里奧利力。當(dāng)物體在旋轉(zhuǎn)參考系中做直線運(yùn)動(dòng)時(shí),會(huì)受到科里奧利力的作用,MEMS陀螺儀通過(guò)檢測(cè)科里奧利力來(lái)測(cè)量角速度。 2. 加速度計(jì)原理
加速度計(jì)的基本原理是牛頓第二定律,即力等于質(zhì)量乘以加速度(F = ma)。加速度計(jì)內(nèi)部有一個(gè)質(zhì)量塊,當(dāng)無(wú)人機(jī)加速時(shí),質(zhì)量塊會(huì)受到慣性力的作用。通過(guò)測(cè)量質(zhì)量塊所受的慣性力,就可以計(jì)算出無(wú)人機(jī)的加速度。例如,在電容式加速度計(jì)中,質(zhì)量塊與固定電極之間形成電容,當(dāng)無(wú)人機(jī)加速時(shí),質(zhì)量塊的位移會(huì)改變電容的值,通過(guò)檢測(cè)電容的變化就可以得到加速度的大小。不同類型的加速度計(jì)(如壓電式、壓阻式等)雖然工作原理略有不同,但都是基于測(cè)量質(zhì)量塊的慣性力來(lái)實(shí)現(xiàn)加速度測(cè)量的。 3. GPS原理
GPS系統(tǒng)由衛(wèi)星星座、地面控制站和用戶設(shè)備(無(wú)人機(jī)上的GPS接收器)三部分組成。衛(wèi)星不斷發(fā)射包含衛(wèi)星位置、時(shí)間等信息的信號(hào)。無(wú)人機(jī)上的GPS接收器接收到衛(wèi)星信號(hào)后,根據(jù)信號(hào)傳播的時(shí)間來(lái)計(jì)算衛(wèi)星到無(wú)人機(jī)的距離。由于衛(wèi)星的位置是已知的,通過(guò)測(cè)量至少三顆衛(wèi)星到無(wú)人機(jī)的距離,就可以利用三角定位原理確定無(wú)人機(jī)的位置。具體計(jì)算過(guò)程涉及到衛(wèi)星信號(hào)的解碼、時(shí)間同步、距離計(jì)算和位置解算等多個(gè)步驟。同時(shí),GPS接收器還可以通過(guò)接收多顆衛(wèi)星的信號(hào),利用多普勒效應(yīng)測(cè)量無(wú)人機(jī)的速度信息。
1. PID控制算法原理
PID控制算法的核心思想是基于誤差反饋來(lái)調(diào)整控制輸出。對(duì)于無(wú)人機(jī)的姿態(tài)控制或位置控制等應(yīng)用,設(shè)目標(biāo)值為r(t),實(shí)際測(cè)量值為y(t),則誤差e(t)=r(t) - y(t)。比例項(xiàng)P的輸出u_P(t)=K_P * e(t),其中K_P為比例系數(shù),比例項(xiàng)的作用是根據(jù)誤差的大小按比例地輸出控制信號(hào),誤差越大,輸出信號(hào)越強(qiáng),能夠快速響應(yīng)誤差的變化。積分項(xiàng)I的輸出u_I(t)=K_I∫e(t)dt,其中K_I為積分系數(shù),積分項(xiàng)主要用于消除穩(wěn)態(tài)誤差,當(dāng)存在長(zhǎng)期的小誤差時(shí),積分項(xiàng)會(huì)不斷積累,產(chǎn)生一個(gè)糾正誤差的輸出。微分項(xiàng)D的輸出u_D(t)=K_D * de(t)/dt,其中K_D為微分系數(shù),微分項(xiàng)根據(jù)誤差的變化率來(lái)調(diào)整控制輸出,當(dāng)誤差變化過(guò)快時(shí),微分項(xiàng)會(huì)產(chǎn)生一個(gè)抑制信號(hào),防止系統(tǒng)出現(xiàn)超調(diào)現(xiàn)象。最終的控制輸出u(t)=u_P(t)+u_I(t)+u_D(t)。 2. 模糊PID控制算法原理
模糊PID控制算法是在傳統(tǒng)PID控制算法的基礎(chǔ)上引入模糊邏輯。首先將誤差e(t)和誤差變化率de(t)/dt等輸入量進(jìn)行模糊化處理,即將其映射到模糊集合上,例如將誤差劃分為“正大”“正中”“正小”“零”“負(fù)小”“負(fù)中”“負(fù)大”等模糊集合。然后根據(jù)模糊規(guī)則表,根據(jù)輸入的模糊集合確定PID控制器的比例、積分和微分系數(shù)的調(diào)整規(guī)則。例如,如果誤差為“正大”且誤差變化率為“正大”,則可能需要較大幅度地增加比例系數(shù),適當(dāng)增加積分系數(shù),減小微分系數(shù)等。最后將調(diào)整后的系數(shù)應(yīng)用于PID控制器進(jìn)行控制輸出。模糊PID控制算法能夠根據(jù)實(shí)際飛行情況動(dòng)態(tài)調(diào)整PID系數(shù),提高控制的適應(yīng)性和魯棒性。
1. 電機(jī)控制原理
在多旋翼無(wú)人機(jī)中,電機(jī)的控制是通過(guò)電調(diào)實(shí)現(xiàn)的。飛行控制器根據(jù)姿態(tài)控制和導(dǎo)航的要求,向電調(diào)發(fā)送PWM(脈沖寬度調(diào)制)信號(hào)。PWM信號(hào)的占空比決定了電調(diào)輸出到電機(jī)的平均電壓或電流。例如,當(dāng)PWM信號(hào)的占空比為50%時(shí),電調(diào)輸出到電機(jī)的平均電壓為電池電壓的一半。電機(jī)的轉(zhuǎn)速與輸入的電壓或電流成正比,因此通過(guò)調(diào)整PWM信號(hào)的占空比,就可以精確控制電機(jī)的轉(zhuǎn)速。同時(shí),不同類型的電機(jī)(如無(wú)刷直流電機(jī))還有其自身的特性,如反電動(dòng)勢(shì)等,在電機(jī)控制過(guò)程中也需要考慮這些特性,以實(shí)現(xiàn)高效、穩(wěn)定的電機(jī)控制。 2. 電池管理原理
電池管理系統(tǒng)主要對(duì)電池的充電和放電過(guò)程進(jìn)行管理。在充電過(guò)程中,電池管理系統(tǒng)會(huì)監(jiān)測(cè)電池的電壓、電流和溫度等參數(shù)。當(dāng)電池電壓達(dá)到設(shè)定的充電截止電壓時(shí),停止充電,防止電池過(guò)充。例如,對(duì)于鋰電池,充電截止電壓一般為4.2V左右。在放電過(guò)程中,實(shí)時(shí)監(jiān)測(cè)電池的電量、電壓等參數(shù),當(dāng)電池電量低于設(shè)定的下限值或者電池電壓低于放電截止電壓時(shí),采取相應(yīng)的措施,如通知飛行控制器發(fā)出返航指令或者降低飛行功率等。同時(shí),電池管理系統(tǒng)還會(huì)對(duì)電池進(jìn)行均衡充電,即通過(guò)電路使電池單體之間的電壓保持平衡,避免某個(gè)單體電池過(guò)充或過(guò)放,延長(zhǎng)電池的使用壽命。
1. 傳感器升級(jí)
采用更高精度的傳感器可以顯著提升飛行控制器的性能。例如,將普通的MEMS陀螺儀和加速度計(jì)升級(jí)為高精度的光纖陀螺儀和石英加速度計(jì)。光纖陀螺儀具有更高的精度和穩(wěn)定性,能夠更精確地測(cè)量無(wú)人機(jī)的角速度,對(duì)于提高姿態(tài)控制的準(zhǔn)確性非常有幫助。石英加速度計(jì)相比于普通的MEMS加速度計(jì),在測(cè)量加速度時(shí)具有更小的誤差和更高的分辨率。同時(shí),增加傳感器的冗余度也是一種優(yōu)化方法。通過(guò)安裝多個(gè)相同類型的傳感器,并采用數(shù)據(jù)融合技術(shù),可以提高傳感器數(shù)據(jù)的可靠性。例如,在無(wú)人機(jī)上安裝多個(gè)GPS接收器,當(dāng)其中一個(gè)GPS接收器出現(xiàn)故障或者信號(hào)受到干擾時(shí),其他GPS接收器仍然可以提供準(zhǔn)確的位置信息。 2. 處理器性能提升
使用更強(qiáng)大的處理器可以加快飛行控制器的數(shù)據(jù)處理速度。例如,從傳統(tǒng)的低性能微控制器升級(jí)為高性能的ARM Cortex - A系列處理器。高性能處理器具有更高的時(shí)鐘頻率和更強(qiáng)的運(yùn)算能力,能夠更快地處理傳感器采集的數(shù)據(jù)、運(yùn)行復(fù)雜的控制算法。這對(duì)于實(shí)時(shí)性要求很高的無(wú)人機(jī)飛行控制非常重要,特別是在處理多傳感器數(shù)據(jù)融合、復(fù)雜的飛行模式切換和
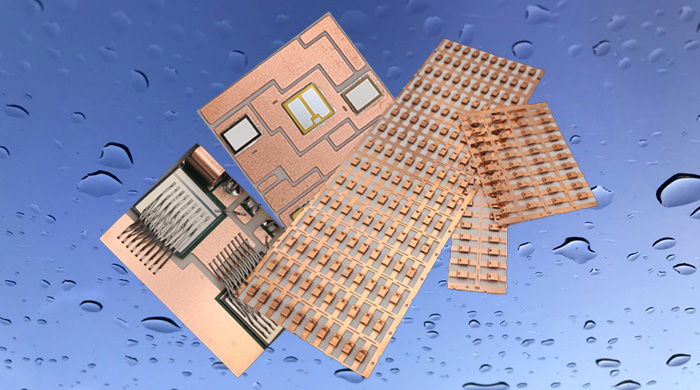
半導(dǎo)體封裝清洗劑W3100介紹
半導(dǎo)體封裝清洗劑W3100是合明科技開(kāi)發(fā)具有創(chuàng)新型的中性水基清洗劑,專門(mén)設(shè)計(jì)用于浸沒(méi)式的清洗工藝。適用于清洗去除半導(dǎo)體電子器件上的助焊劑殘留物,如引線框架、分立器件、功率模塊、倒裝芯片、攝像頭模組等。本品是PH中性的水基清洗劑,因此具有良好的材料兼容性。
半導(dǎo)體封裝清洗劑W3100的產(chǎn)品特點(diǎn):
1、本品可以用去離子水稀釋后使用,稀釋后為均勻單相液,應(yīng)用過(guò)程簡(jiǎn)單方便。
2、產(chǎn)品PH值呈中性,對(duì)鋁、銅、鎳、塑料、標(biāo)簽等敏感材料上顯示出極好的材料兼容性。
3、不含鹵素,材料環(huán)保;氣味清淡,使用液無(wú)閃點(diǎn),使用安全,不需要額外的防爆措施。
4、由于PH中性,減輕污水處理難度。
半導(dǎo)體封裝清洗劑W3100的適用工藝:
水基清洗劑W3100適用于浸沒(méi)式的清洗工藝。
半導(dǎo)體封裝清洗劑W3100產(chǎn)品應(yīng)用:
水基清洗劑W3100是合明科技開(kāi)發(fā)具有創(chuàng)新型的中性水基清洗劑,適用于清洗去除半導(dǎo)體電子器件上的助焊劑殘留物,如引線框架清洗、分立器件清洗、功率模塊清洗、倒裝芯片清洗、攝像頭模組清洗等。本產(chǎn)品PH值呈中性,對(duì)鋁、銅、鎳、塑料、標(biāo)簽等敏感材料上顯示出極好的材料兼容性。


![[x]](/template/default/picture/closeimgfz1.svg)




![[→]](/template/default/picture/you.svg)







![[↓]](/template/default/image/xiangxiaimgfaz1-1.svg)





![[圖標(biāo)]](/template/default/picture/fc1c83eb02c951ce168aaebde4fd8205.svg)



![[↑]](/template/default/picture/rtxiangshangimg1.svg)